The robot is made up of 5 axis. These axes are controlled by five servo-motors with a resolution of 255 positions:
1 It turns on its base on a 180 angle.
2 It pivots fowards and backwards around the shoulder with a 90 amplitude.
3 The claw opens and shuts on the objects tobe grasped.
4 The claw pivots in an up and down motion with a 90 amplitude.
5 The claw opens and shuts on the objects to be grasped.
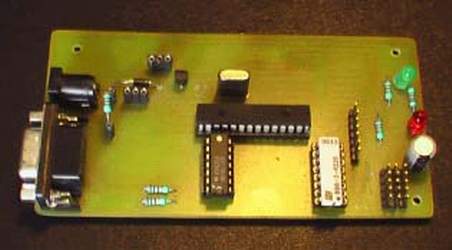
The position and movement speed of robots' axis are controlled by a 16 bit micro-processor card. This card transmits an electric signal to each motor defining the position which the robot should take. The card receives the orders of the robot's position from the personal computer in the form of a digital electric signal ranging from 0 to 255 and worked out by the position of the potentiometers on the screen. The 255 positions of the potentiometer correspond to the 255 positions of a robot's axis
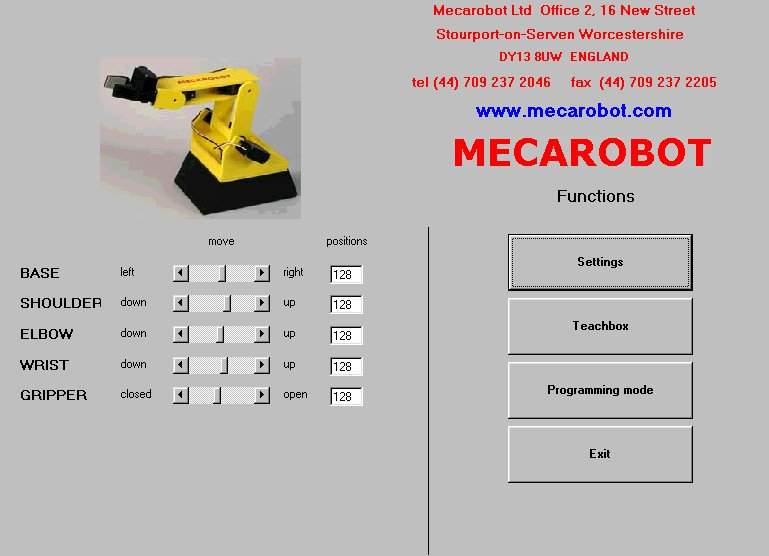
Robots Movements: Robots are driven manually from a graphic interface on the screen of the personal computer by potentiometers and control buttons. To each axis is associated a cursor enabling a movement from 0 to 255 increments.
Learning, synthesis and repetition of movements: The software memorizes the successive movements of the robot and reproduces them. It is capable of reproducing and linking movements automatically as in industrial processing.
Mecarobot Arm Video ! See This Link: The Old Robots Web Site - YouTube/Robot Arm/Playlist