Kermit The Robot Notes by Owen R. Rubin
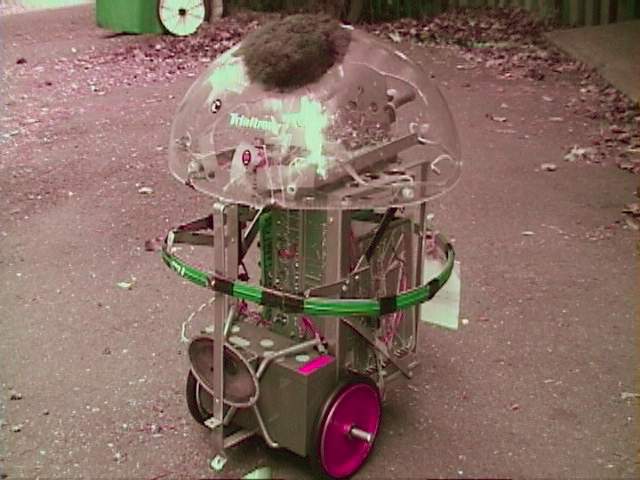
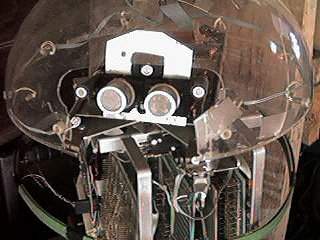
Kermit was originally built by Atari's Engineering Group in Grass Valley, California. Kermit was abandoned in the Sunnyvale offices. Some electronic work to make it run again was needed and some new software was written to make it do different things. As you can see, he is not in the best shape right now. It will power up and one motor has gone bad, and the sensors are out again. He also took a spill down the stairs at Atari in his last few days and it cracked his head, a plastic bowl, and broke a bunch of the bulbs in the head dome. See these links:
My appreciation to: Cyberneticzoo.com Atari Museum Atara Mania - Kermit Robot Screen The Story Of Kermit The Robot