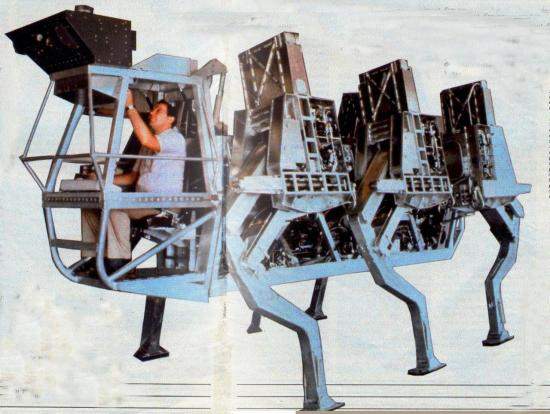
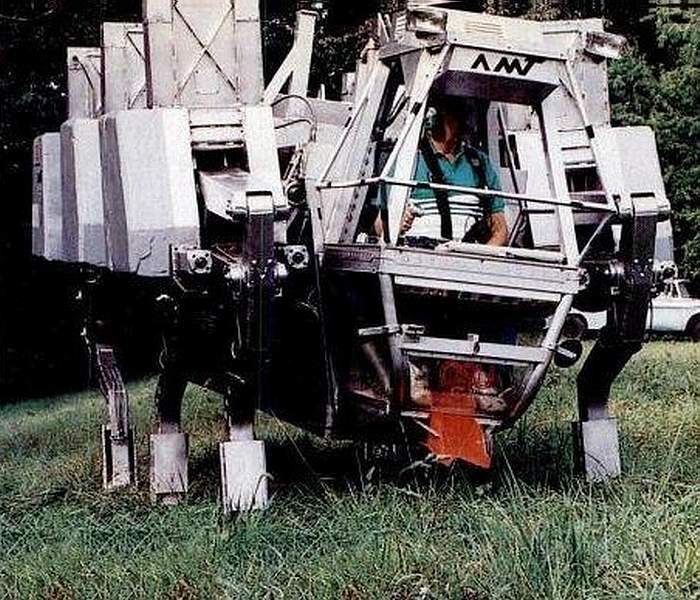
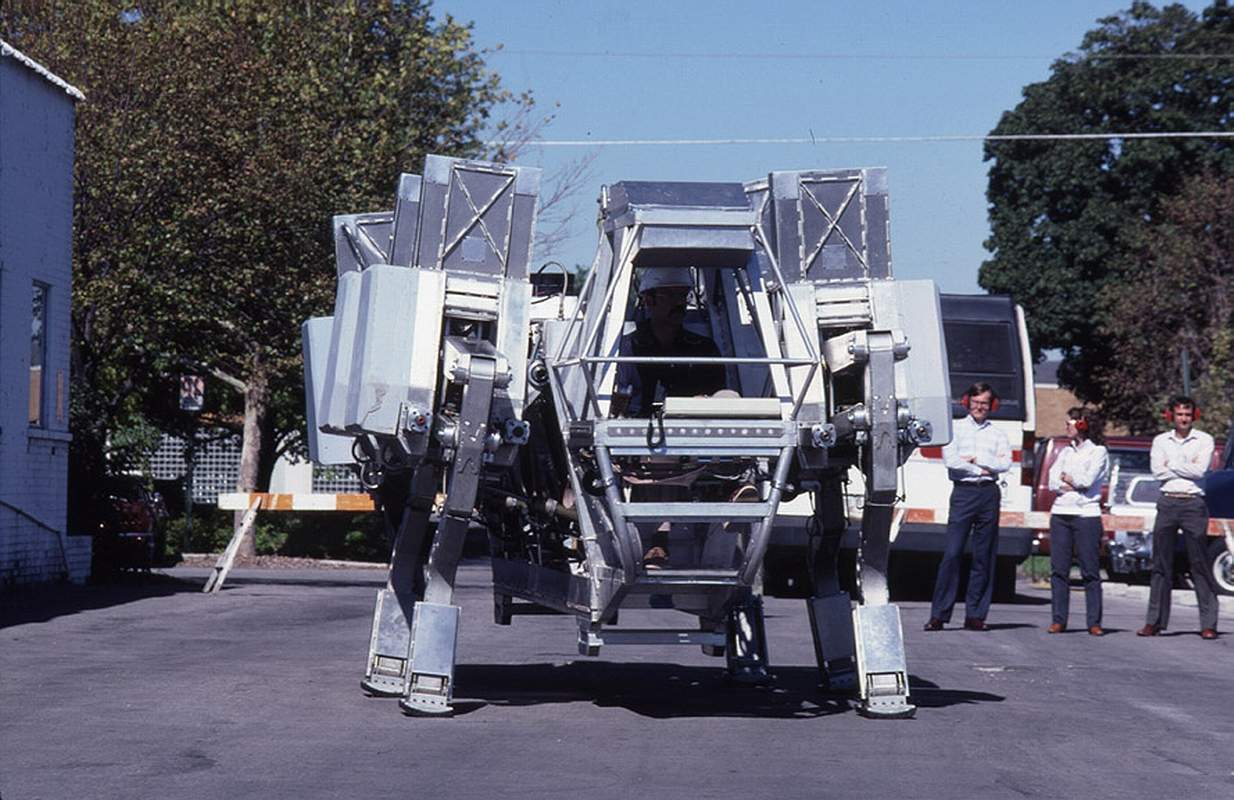
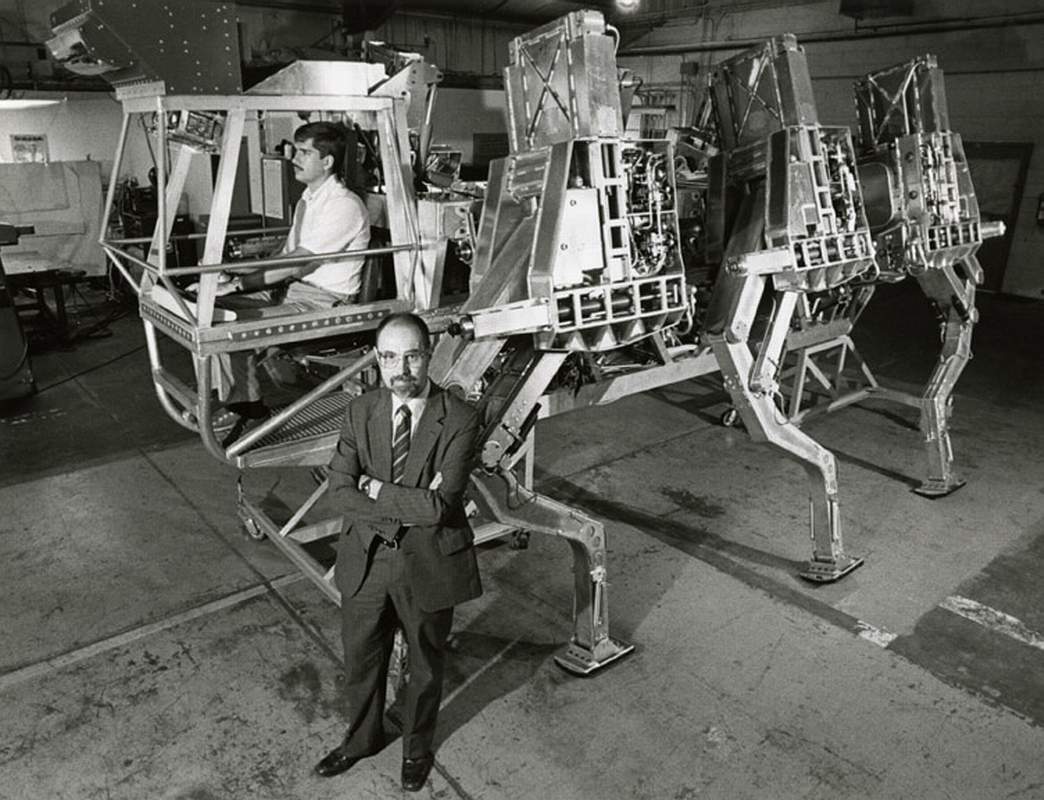
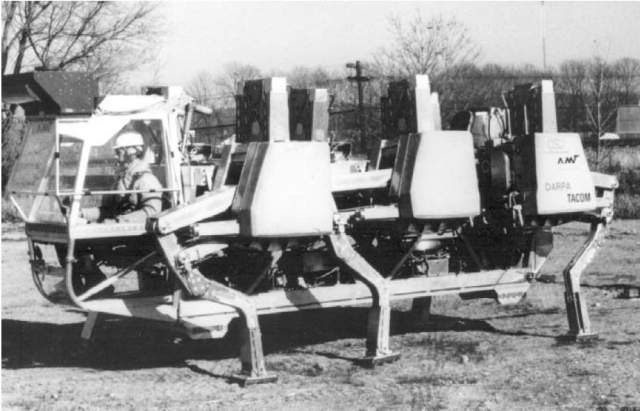
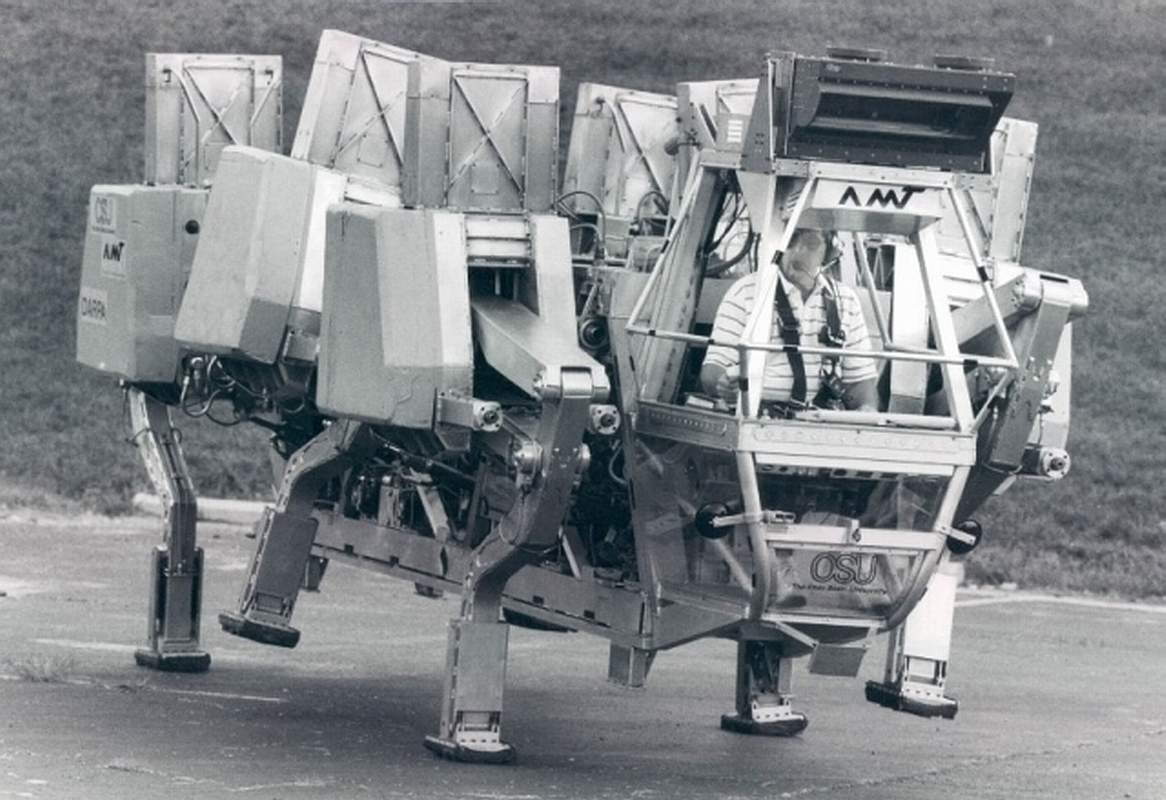
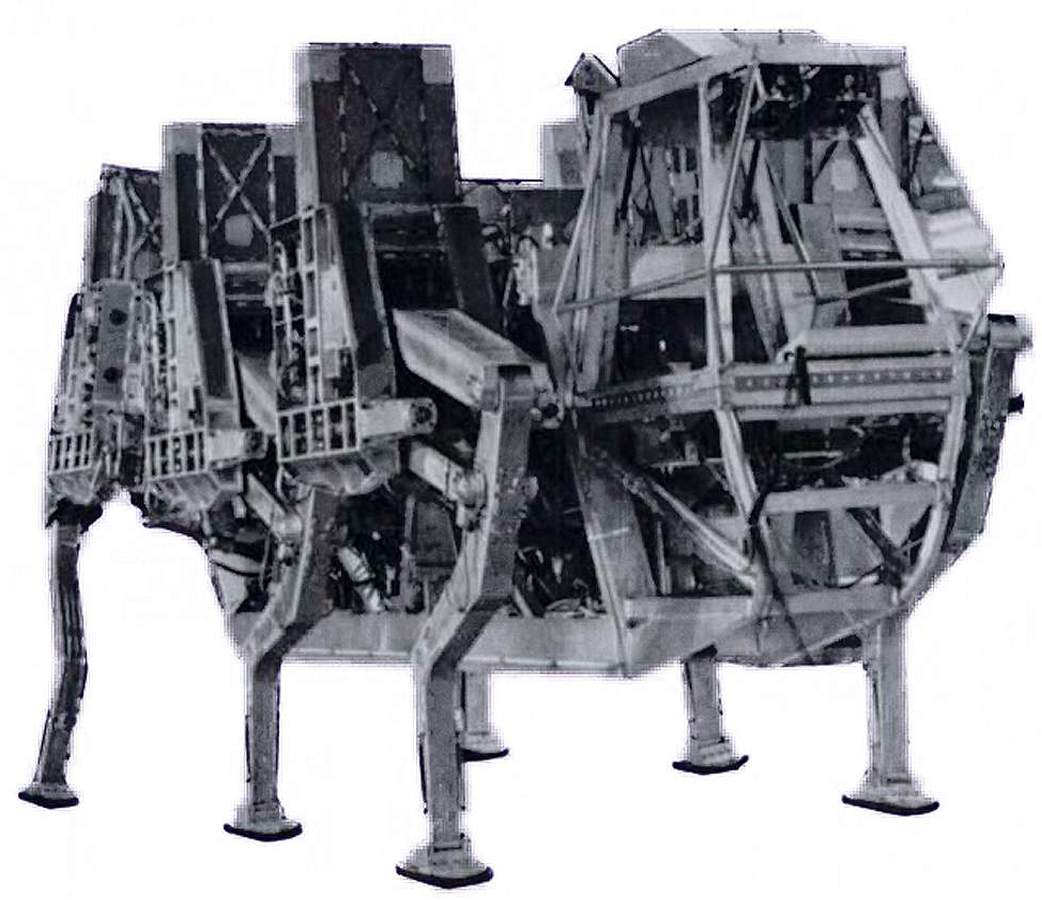
Adaptive Suspension Vehicle (ASV) "Walker"Is 17 ft. long, 8 ft. wide, and 10.5 ft. high, and had six legs to support its three-ton aluminum body. It was designed to carry cargo for industrial and military applications over rough, mountainous, icy or muddy terrain, and was capable of crossing 9 ft. wide ditches or 7 ft. high walls.
A forward mounted radar system scanned the terrain ahead, and fed that data, along with instructions from the operator’s joystick, into the 16 onboard computers that coordinated and controlled the ASV’s legs. From there, the computers moved each leg individually across its individual axes of motion up and down, forward and back, and closer or farther from the ASV’s body.
This Video is brought to you through the Courtesy of: cyberneticzoo.com a history of cybernetic animals and early robots.